![]() 電力
電力
![]() 電力
電力
挑戰(zhàn):
創(chuàng)建高級(jí)相量測(cè)量單元(PMU),以確定配電網(wǎng)絡(luò)的運(yùn)行進(jìn)度,并改進(jìn)配電網(wǎng)絡(luò)為主動(dòng)式智能電網(wǎng)。
解決方案:
開發(fā)基于NI CompactRIO硬件、NI LabVIEW和LabVIEW Real-Time模塊的高性能PMU。其中NI LabVIEW用于現(xiàn)場(chǎng)可編程門陣列(FPGA)級(jí)編程,以實(shí)現(xiàn)基于全球定位系統(tǒng)(GPS)時(shí)間基準(zhǔn)的高精度時(shí)間同步,LabVIEW Real-Time模塊用于開發(fā)精確的同步相量估計(jì)算法。
由被動(dòng)式向主動(dòng)式的演變使配電網(wǎng)絡(luò)的運(yùn)行程序發(fā)生了巨大的變化,尤其是在實(shí)時(shí)監(jiān)測(cè)網(wǎng)絡(luò)時(shí)。我們需要使用先進(jìn)的智能監(jiān)測(cè)工具來(lái)快速可靠地估計(jì)這些網(wǎng)絡(luò)的實(shí)時(shí)狀態(tài)。這一領(lǐng)域最有前景的技術(shù)之一就是基于PMU的分布式監(jiān)測(cè)。
同步相量估計(jì)算法均基于離散傅立葉變換(DFT)應(yīng)用于代表網(wǎng)絡(luò)節(jié)點(diǎn)電壓和/或分支電流波形的準(zhǔn)穩(wěn)態(tài)信號(hào)。我們可以將這些基于DFT算法分成用于執(zhí)行遞歸和非遞歸更新的單周期DFT估計(jì)函數(shù)和小數(shù)周期DFT估計(jì)函數(shù)。我們創(chuàng)建了一個(gè)DFT算法,使我們可以在主動(dòng)式配電網(wǎng)絡(luò)中使用PMU,而且即使存在失真信號(hào)波形和機(jī)電暫態(tài)(即頻變信號(hào)),也可在特定范圍內(nèi)保持同步相量的測(cè)量精度。
與輸電網(wǎng)絡(luò)相比,主動(dòng)式配電網(wǎng)絡(luò)的特性是線路長(zhǎng)度較短和輸電量有限。使用總線電壓同步相量方法來(lái)判斷網(wǎng)絡(luò)狀態(tài)時(shí),這兩個(gè)特性就使得總線電壓相量之間的相位差非常小(一般在幾十毫弧度或更低)。這些特性要求PMU設(shè)備具有遠(yuǎn)低于IEEE C37.118規(guī)定限值的同步相量相位不確定度。配電網(wǎng)絡(luò)的失真電平遠(yuǎn)高于輸電網(wǎng)絡(luò)。此外,即使與主輸電網(wǎng)絡(luò)隔離,主動(dòng)式配電網(wǎng)絡(luò)也可以運(yùn)行。因此進(jìn)行隔離和重新連接操作時(shí),PMU就為配電網(wǎng)運(yùn)營(yíng)提供很大的支持。但是由于額定網(wǎng)絡(luò)頻率偏差通常不可忽略,使用PMU來(lái)監(jiān)測(cè)機(jī)電暫態(tài)可能會(huì)導(dǎo)致對(duì)同步相量相位和頻率的估計(jì)不正確。
同步相量估計(jì)算法
基于DFT的傳統(tǒng)同步相量估計(jì)算法通常直接對(duì)以幾千赫茲采樣的信號(hào)進(jìn)行DFT,再根據(jù)DFT輸出執(zhí)行同步相量測(cè)量。另一方面,我們的算法雖然仍基于DFT,但采用的是一個(gè)兩步驟方法,其中第一個(gè)步驟是對(duì)輸入信號(hào)進(jìn)行DFT分析,第二個(gè)步驟是對(duì)與基頻信號(hào)對(duì)應(yīng)的重構(gòu)時(shí)域信號(hào)進(jìn)行時(shí)域分析。第一步的獨(dú)特之處在于它采用本文提出的方法來(lái)識(shí)別基頻信號(hào)。該算法在高采樣頻率下(例如,100千赫)可提供準(zhǔn)確的結(jié)果。下面簡(jiǎn)要介紹一下同步相量估計(jì)算法。
同步相量估計(jì)算法包含以下三個(gè)步驟:
1.在80 ms(即50 Hz四個(gè)周期)的時(shí)間窗口(T)內(nèi)對(duì)三相電壓采樣,從UTC-GPS脈沖每秒(PPS)波前(通常為1或10 PPS)對(duì)應(yīng)的時(shí)間開始。
2.將基頻信號(hào)重構(gòu)為正弦信號(hào),正弦信號(hào)的頻率為特定單一頻率窗口ΔF(也就是f0±ΔF,其中f0是指電網(wǎng)頻率的額定值)中某個(gè)值。我們使用LabVIEW Real-Time模塊和CompactRIO實(shí)時(shí)微控制器來(lái)實(shí)現(xiàn)這一步驟。
3.以重構(gòu)的基頻信號(hào)波形為基準(zhǔn),估計(jì)同步相量的振幅、相位和頻率。我們使用LabVIEW Real-Time模塊和CompactRIO實(shí)時(shí)微控制器來(lái)實(shí)現(xiàn)這一步驟。
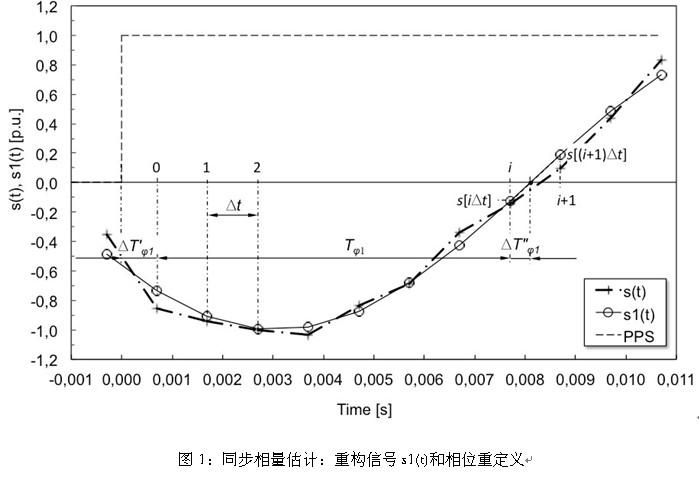
圖1總結(jié)了用上述過程所獲得的信號(hào)分析。其中虛點(diǎn)線表示用于估計(jì)同步相量的通用失真信號(hào),連續(xù)實(shí)線表示時(shí)域重構(gòu)的基頻信號(hào),虛線表示PPS信號(hào)。
PMU原型
我們?cè)谂鋫淞?百萬(wàn)門FPGA的NI CompactRIO嵌入式實(shí)時(shí)微控制器上實(shí)現(xiàn)同步相量估計(jì)算法。我們使用NI9215 C系列模塊,以±10 V的動(dòng)態(tài)信號(hào)輸入和100 kHz的采樣頻率對(duì)電壓波形進(jìn)行采樣。 UTC-GPS時(shí)間幀由時(shí)間同步不確定度為100 ns的S。E。A GPSIB移動(dòng)模塊提供。我們使用NI9401數(shù)字I/O模塊作為計(jì)數(shù)器來(lái)執(zhí)行PPS前上升沿(由GPS裝置提供)和數(shù)字化波形的第一個(gè)采樣之間的測(cè)量。
FPGA將PPS的數(shù)量發(fā)送給GPS設(shè)備,GPS設(shè)備生成PPS信號(hào)發(fā)送到NI9215和NI9401。這些連接觸發(fā)啟動(dòng)PPS前沿(持續(xù)時(shí)間與觀測(cè)時(shí)窗T相對(duì)應(yīng))對(duì)應(yīng)的波形采樣。同時(shí),發(fā)送到NI 9401模塊的PPS前沿觸發(fā)FPGA計(jì)數(shù)器開始以FPGA時(shí)鐘頻率運(yùn)行,對(duì)于系統(tǒng)所采用的硬件,F(xiàn)PGA時(shí)鐘頻率為40 MHz。該計(jì)數(shù)器在采樣波形的第一個(gè)采樣處停止運(yùn)行,進(jìn)行計(jì)算(參見圖1)。然后采樣數(shù)據(jù)以及GPS時(shí)間標(biāo)記插入到DMA FIFO存儲(chǔ)器,并由實(shí)時(shí)微控制器進(jìn)行檢索,以執(zhí)行同步相量估計(jì)算法。 PPS的數(shù)量對(duì)應(yīng)于每秒同步相量估計(jì)的數(shù)量。
PMU實(shí)驗(yàn)表征和結(jié)論
實(shí)驗(yàn)表征以具有頻率恒定的頻譜分量的周期信號(hào)為基準(zhǔn)。我們將NI PXI機(jī)箱連接至NI PXI任意波形發(fā)生器、NI PXI定時(shí)和同步模塊、NI PXI高精度數(shù)據(jù)采集模塊以及NI PXI高性能嵌入式控制器,生成一個(gè)基準(zhǔn)信號(hào)。我們分析了兩種情況:?jiǎn)我粜盘?hào)(50赫茲)和失真信號(hào)。對(duì)于失真的信號(hào),我們生成的基準(zhǔn)信號(hào)的頻譜分量等于標(biāo)準(zhǔn)EN50160規(guī)定的限值。表1總結(jié)了PMU的不確定性,證明所開發(fā)的設(shè)備可兼容主動(dòng)式配電網(wǎng)絡(luò)應(yīng)用的要求。
以下是一個(gè)較為完整的實(shí)驗(yàn)表征描述,表明了PMU原型的性能不會(huì)受到頻率不斷變化的信號(hào)的影響,頻率不斷變化的信號(hào)代表緩慢的機(jī)電暫態(tài)。

責(zé)任編輯: 中國(guó)能源網(wǎng)
關(guān)于我們 | 會(huì)務(wù)服務(wù) | 咨詢服務(wù) | 誠(chéng)聘英才 | 相關(guān)法律 | 會(huì)員注冊(cè) | 網(wǎng)站地圖 | 合作伙伴 | 友情鏈接
Copyright © 1999-2025 北京中能網(wǎng)訊咨詢有限公司 版權(quán)所有. All rights reserved.
地址:北京市海淀區(qū)北蜂窩8號(hào)中雅大廈A座14層 郵政編碼:100038
電話:010-51915010,30 傳真:010-51915237
支持單位: 中國(guó)企業(yè)投資協(xié)會(huì)|中國(guó)動(dòng)力工程學(xué)會(huì)| 中國(guó)電機(jī)工程學(xué)會(huì)|中國(guó)城市燃?xì)鈪f(xié)會(huì) 承辦單位:北京中能網(wǎng)訊咨詢有限公司
 京公網(wǎng)安備 11010802020613號(hào)
京公網(wǎng)安備 11010802020613號(hào)